Download
1 / 11
110 likes | 278 Views
BAB VII Metode Respons Frekuensi. Pengertian. The frequency response is a representation of the system's response to sinusoidal inputs at varying frequencies. The output of a linear system to a sinusoidal input is a sinusoid of the same frequency but with a different magnitude and phase.

E N D
Pengertian • The frequency response is a representation of the system's response to sinusoidal inputs at varying frequencies. • The output of a linear system to a sinusoidal input is a sinusoid of the same frequency but with a different magnitude and phase. • The frequency response is defined as the magnitude and phase differences between the input and output sinusoids. In this tutorial, we will see how we can use the open-loop frequency response of a system to predict its behavior in closed-loop.
Ada 2 macam • Bode Plot • Diagram Bode merupakan salah satu metoda analisa dalam perancangan sistem kendali yang memperhatikan tanggapan frekuensi sistem yang diplot secara logaritmik. • Nyquist Diagram
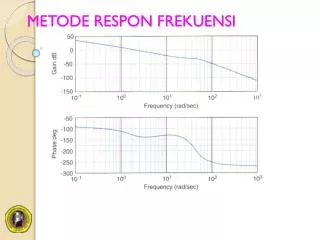
R(s) C(s) G (s) H(s) Bode Plot • Jika suatu sistem memiliki gambar berikut: • memiliki fungsi alih G(s)H(s), maka tanggapan frekuensi dapat diperoleh dengan mensubstitusi s =jω. Sehingga diperoleh responnya adalah G(jω)H(jω). • Karena G(jω)H(jω) adalah suatu bilangan kompleks, maka untuk menggambarkannya dibutuhkan dua buah grafik yang merupakan fungsi dari ω yaitu: • Grafik magnitude terhadap frekuensi • Grafik fasa terhadap frekuensi
Grafik magnitude danGrafik fasa terhadap frekuensi untuk G(s) =1/(s + 2)
Diagram Nyquist • tanggapan frekuensi fungsi kompleks G(jω)H(jω) dapat digambarkan pada bidang kompleks dengan memasukkan nilai frekuensi dari ω=0sampai dengan ω = ∞. Penggambaran fungsi kompleks dilakukan dengan menguraikannya menjadi besaran magnitude dan fasa sebagai berikut:
lanjutan • Dengan menentukan rentang frekuensi yang diinginkan, disusun data seperti tabel
lanjutan • Kriteria Nyquist menyatakan bahwa sistem akan stabil apabila bidang sebelah kanan kurva G(jω)H(jω) tidak melingkupi titik (-1,0). Tingkat kestabilan sistem dapat diukur dengan Gain Margin (GM) dan Phase Margin (PM), yang didefinisikan sebagai berikut:
Harga θ pada PM adalah nilai sudut fasa saat kurva Nyquist berpotongan dengan lingkaran berjari-jari satu. Pada sistem yang stabil, GM dan PM-nya selalu positif. Semakin besar nilai GM dan PM, maka semakin stabil sistem tersebut.
Menentukan stabilitas sistem dengan persamaan: • Z = N + P • dengan • N = jumlah perputaran dari origin yang melingkupi titik (-1,0) • P = jumlah pole dari fungsi alih open-loop G(s)H(s) yang terletak di sebelah kanan sumbu imeginer (RHP : Right Half Plane) • Z = jumlah akar persamaan karakteristik sistem pada RHP