Download
1 / 25
330 likes | 762 Views
Mehatronika Upravljanje sistemima. Mehatronika. Sa držaj predavanja. Sistemi upravljanja Jednokonturni regulacioni sistem Kaskadna regulacija Osnovna svojstva kaskadne regulacije. Sistemi upravljanja. Šta je sistem? ■ Sistem ima ulaze, izlaze i ograničenja.

E N D
MehatronikaUpravljanje sistemima Mehatronika
Sadržaj predavanja • Sistemi upravljanja • Jednokonturni regulacioni sistem • Kaskadna regulacija • Osnovna svojstva kaskadne regulacije
Sistemi upravljanja • Šta je sistem? • ■ Sistem ima ulaze, izlaze i ograničenja. U sistemima upravljanja je važan odziv sistema na ulaze.
Sistemi upravljanja • Istorijski razvoj sistema automatskog upravljanja • ■ 1769 James Watt - regulator za reguliranje centrifugalne brzine. • ■ Laplace (1749-1827) i Fourier (1758-1830) - postavili važne matematičke osnove za analizu sistema upravljanja. • ■ 1868 Maxwell - razvio diferencijalne jednačine za regulator, linearizirao ih oko ravnotežne tačke i pokazao kako stabilnost sistema zavisi od korena karakteristične jednačine koji imaju negativne realne delove. • ■ 1875 Hurwitz i 1905 Routh - stabilnost linearnih sistema upravljanja. • ■ 1893 Lyapunov - analiza stabilnosti nelinearnih sistema upravljanja. • ■ Nyquist (1932), Bode (1945) i Nichols (u periodu od 1945 do 1960) opisali kako se obavlja analiza stabilnosti sistema u frekventnom području. • ■ 1948 (Evans) - postupak analize stabilnosti pomoću geometrijskog mesta korena.
Sistemi upravljanja • ■ 1949 (Wiener) uvodi koncept optimalnog upravljanja, 1957 Bellman razvija postupak dinamičkog programiranja, a 1962 Pontryagin metod principa maksimuma. • ■ Kalman 1960 uvodi LQ, a 1961 zajedno s Bucy-om uvodi LQG metod optimalnog upravljanja. • ■ 1971 Athans uvodi koncept robusnog upravljanja (HM), Grimble 1988 metod |j-sinteze. • ■ Teoriju neuronskih mreža u sisteme automatskog upravljanja prvi uvodi Hebb 1949, a dalje je razvijaju Widrow-Hoff (1960), Rosenblatt (1961), Kohonen (1987),.... • ■ 1965 Zadeh definiše neizrazitu logiku. • ■ 1976 Mamdani razvija prvi neizraziti regulator, a kasnije slede radovi u polju neizrazitog upravljanja Sugeno (1985), Sutton (1991),....
Sistemi upravljanja • Podela u odnosu na postojanje povratne veze: • Otvoreni sistemi upravljanja (bez povratne veze), • Zatvoreni sistemi upravljanja (sa povratnom vezom). • Podela u odnosu na linearnost regulatora (procesa): • Linearni sistemi, • Nelinearni sistemi. • Podela u odnosu na broj upravljačkih kontura (petlji): • Jednokonturni sistemi, • Višekonturni (kaskadna regulacija). • Podela u odnosu na broj ulaza, odnosno izlaza regulatora: • SISO (single input single output), • SIMO (single input multi output), • MIMO (multi input multi output), • MISO (multi input single output).
Sistemi upravljanja • Podela u odnosu na karakter upravljačke varijable: • Kontinuirani sistemi upravljanja, • Diskretni (digitalni) sistemi upravljanja. • Podela u odnosu na domen upravljanja: • Sistemi projektovani u vremenskoj domeni, • Sistemi projektovani u frekvencijskoj domeni. • Podela u odnosu na distribuiranost upravljanja: • Centralizirani sistemi upravljanja, • Distribuirani sistemi upravljanja. • Podela u odnosu na način odupiranja delovanju smetnji: • Adaptivni sistemi upravljanja, • Prediktivni sistemi upravljanja, • Robusni sistemi upravljanja, • Optimalni sistemi upravljanja, • Inteligentni sistemi upravljanja.
Sistemi upravljanja • Otvoreni sistemi upravljanja • ■ Otvoreni sistemi upravljanja koriste se za jednostavne operacije. • - Glavni problem otvorenog sistema upravljanja je osetljivost upravljane varijable na promene ulazne smetnje. • Primer: otvoreni sistem upravljanja temperaturom prostorije. Ako je plin uključen i temperatura prelazi 20 ºC (referentna temperatura), tada je potrebno otvoriti vrata da temperatura ne bi prešla referentnu (nema povratne veze). Drugi način je menjanje spoljne temperature.
Sistemi upravljanja Referentna vrednost Merena vrednost • Zatvoreni sistemi upravljanja (Feedback Control Systems) • Kod regulacije temperature prostorije prvi zahtev je detekcija ili osećanje promene temperature. • Drugi zahtev se odnosi na upravljanje ili menjanje izlazne energije iz plamena gasa. • Da bi se sistem mogao dizajnirati za regulaciju, mora imati minimalno jedan senzor i jedan regulator. • U direktnoj grani se nalazi regulator i proces, a u grani povratne veze senzor.
Sistemi upravljanja • Zatvoreni sistemi upravljanja • Glavni princip u inženjeringu upravljanja. • Tipično upravljanje zasnovano na modelu • Generišu se upravljački signali nakon pojave greške. • Može se kompenzirati uticaj svih smetnji, odnosno poremećajnih veličina (negativna povratna veza). • Smanjuju efekat promene parametara procesa (smanjena osetljivost na promenu parametara). • Može dovesti do pojave nestabilnosti ako sistem nije dobro projektovan (regulisana veličina može oscilovati preko svih granica). • Šum merenja (sa senzora) može dovesti do degradacije performansi.
Sistemi upravljanja Spoljna temperatura Izmerena temperatura • Zatvoreni sistemi upravljanja - primer sistema regulacije temperature prostorije • Fizička realizacija sistema regulacije temperature prostorije • Izlazni signali (temperatura) mere se termočlankom ili otpornim termometrom i uspoređuje sa signalom željene temperature. • Odstupanje temperature od željene vrednosti znači da regulator treba poslati signal ventilu za povećanje/smanjenje toka gasa. • Željena temperatura se obično ručno podešava pomoću potenciometra.
Sistemi upravljanja • Sistem upravljanja sa regulatorom u direktnoj grani (Feedforward Control Systems) pre sumatora • Upravljački signal se generiše pre pojave greške. • Neophodno je pažljivo dizajnirati referentne signale kako bi se učinilo da proces “tačno” sledi referentni signal. • Kompenzira uticaj samo one smetnje u odnosu na koju se projektuje upravljački uređaj (regulator). • Ako je upravljani objekat sam po sebi stabilan, ostaje stabilan i uz delovanje ovakvog upravljanja.
Jednokonturni regulacioni sistem • Sistem sa jednom regulacionom petljom • Regulacija samo jedne promenljive - uključena samo jedna promenljiva u upravljački algoritam. • Otežana regulacija - povećana mogućnost oscilacija, pogotovo kada deluju poremećaji. • Izražen problemodržavanja stabilnosti.
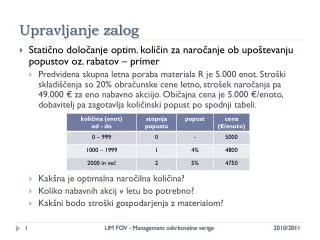
Jednokonturni regulacioni sistem • Primer - PI regulacija nivoa tečnosti u bazenu • Zadato: A=2m2, Rf=15 s/m2, H1=1 m/V, Kv=0.1 m3/sV, Ki=1 • Potrebno je: Naći Ti i ζ kada je frekvencija neprigušenih oscilacije ωn=0.1 rad/s?Odrediti vremenski odziv na skokovitu pobudu (step), kada se ulazmenja od 0 do 4 m. Pretpostaviti nulte početne uslove. Poprečni presek bazena A
Jednokonturni regulacioni sistem Prenosna funkcija PI regulatora je: Brzina protoka tečnosti u bazen opisana je sledećim izrazom: Dinamika bazena je opisana jednačinom: Linearizovani oblikom brzine isticanja tečnosti iz bazena:
Jednokonturni regulacioni sistem Izmerena vrednost nivoa tečnosti u bazenu iznosi: Iz gornjih jednačina se dobija: Prenosna funkcija direktne grane sistema upravljanja glasi:
Jednokonturni regulacioni sistem Konvertor pritiska Blok dijagram sistema upravljanja Prenosna funkcija zatvorenog sistema:
Jednokonturni regulacioni sistem Sređivanjem se dobija sledeći izraz za prenosnu funkciju: Ako se uzme da je H1=1 (tj. hm=h), sledi: Budući da se radi o prenosnoj funkciji drugog reda, sledi da je:
Jednokonturni regulacioni sistem Iz poslednjih izraza se dobija: Zamenom dobijenih vrednosti u izraz za prenosnu funkciju dobija se: Uzimajući u obzir da je amplituda 4m, sledi:
Jednokonturni regulacioni sistem Prema tome odziv sistema na skokovitu pobudu u s-domenu glasi: Postupak prevođenja u vremensku domenu se odvija na sledeći način: iz čega sledi:
Jednokonturni regulacioni sistem Grafički prikaz odziva sistema na skokovitu pobudu: Stvarna vrednost Referenta vrednost Nivo (m) Vreme (s)
Kaskadna regulacija • Sistem sa više regulacijskih petlji. • Podređena (glavna) regulaciona kontura (petlja) – unutrašnja reg. petlja (I). • Nadređena (pomoćna) regulaciona kontura (petlja) – spoljna reg. petlja (II) • Ideja uvođenja kaskadne regulacije: prosmatrati proces kroz više parcijalnih potprocesa.
Kaskadna regulacija • Primer – sistem upravljanja dinamičkim modelom mobilnog robota • Dva regulacijska kruga: • Regulacija pozicije, • Regulacija brzine.
Osnovna svojstva kaskadne regulacije • Prednosti: • Uticaji smetnji koje deluju na unutrašnje regulacione konture kompenziraju se u samim tim konturama i praktično su bez delovanja na nadređene konture; podređene konture su brže od nadređenih. • Svaka regulaciona veličina sistema (to je svaka veličina kojoj je pridružen vlastiti regulator) ograničava se na jednostavan način ugradnjom ograničavača vodeće (referentne) vrednosti regulisane veličine; ovo je zaštitno svojstvo. • Puštanje u pogon i podešavanje parametara sistema obavlja se jednostavno, korak po korak, počev od unutrašnjih petlji prema spoljašnim. • Delovanje nelinearnih i nestacionarnih članova sistema znatno je ograničeno korištenjem kaskadne regulacije (unutarnja petlja sa jediničnom povratnom vezom uz regulator koji ima integralnu komponentu ima pojačanje jedan, bez obzira na to da li su neki elementi konture nelinearni).
Osnovna svojstva kaskadne regulacije • Nedostaci: • Za svaku regulisanu veličinu potreban je regulator sa pripadajućim mernim članom (važan parametar je cena). • Brzina sledovanja (tačnost sledovanja) opada sa brojem kaskada što je posebno važno, na primer, za sledne sisteme (sistem čije je karakter ulazne i izlazne veličine isti).