Download
1 / 36
370 likes | 576 Views
Multimedialny kurs fizyki - mechanika klasyczna.

E N D
Mechanika klasyczna – dział mechaniki w fizyce opisujący ruch ciał (kinematyka), wpływ oddziaływań na ruch ciał (dynamika) oraz badaniem równowagi ciał materialnych (statyka). Mechanika klasyczna oparta jest na prawach ruchu (zasadach dynamiki) sformułowanych przez Isaaca Newtona, dlatego też jest ona nazywana "mechaniką Newtona". Mechanika klasyczna wyjaśnia poprawnie zachowanie się większości ciał w naszym otoczeniu.
Do końca XIX wieku mechanika klasyczna była uznawana za teorię dokładną, na początku XX wieku okazała się niepoprawna w niektórych sytuacjach. W celu wyjaśnienia niezgodności powstały nowe działy mechaniki: • mechanika relatywistyczna wraz z jej teoriami – ogólną teorią względności i szczególną teorią względności, opisujące zachowanie się obiektów poruszających się z prędkością porównywalną z prędkością światła, • mechanika kwantowa opisującą zachowanie się mikroskopijnych obiektów (cząsteczki, atomy, cząstki elementarne).
Wymienione teorie w pewnym sensie obalają mechanikę klasyczną, choć są zbudowane na jej bazie pojęciowej i ją uzupełniają. Pomimo to, mechanika klasyczna jest nadal bardzo użyteczna, ponieważ: • jest prostsza w stosowaniu niż inne teorie, • z pewnymi przybliżeniami może być stosowana w szerokim zakresie, • stanowi podstawę pojęciową dla innych teorii.
Mechanika klasyczna może być używana do opisu ruchu zarówno obiektów rozmiaru człowieka (np. piłka, samochód), jak i wielu astronomicznych obiektów (np. planety, galaktyki), a także obiektów mikroskopijnej wielkości (np. cząsteczek organicznych, a nawet w przybliżeniu i w ograniczonym zakresie do cząstek elementarnych). Przykładowo: ruch elektronu wynikający z mechaniki klasycznej poprawnie opisuje działanie mikroskopu elektronowego, dopiero do wyjaśnienia ograniczeń rozdzielczości mikroskopu elektronowego potrzebujemy odwołania do mechaniki kwantowej, a wyjaśnienie działania mikroskopu elektronowego z użyciem pojęć mechaniki kwantowej byłoby trudne. W ostatnich latach wzrastającym zainteresowaniem cieszy się dział mechaniki klasycznej, a mianowicie dynamika nieliniowa. Kluczowym pojęciem jest tu chaos, a głównym narzędziem – nieliniowe równania różniczkowe i iteracyjne.
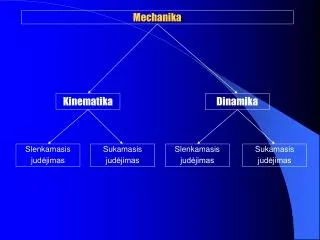
W mechanice klasycznej można wydzielić poddziedziny: • kinematyka– opisująca ruch jako zagadnienie geometryczne, • statyka– zajmująca się ciałami nie poruszającymi się i warunkami pozostania ciał w spoczynku (równowadze), • dynamika – opisująca ruch ciał oraz zmiany ruchu ciał pod wpływem oddziaływań.
Kinematyka(gr. kínēma "ruch") - dział mechaniki zajmujący się badaniem geometrycznych właściwości ruchu ciał bez uwzględniania ich cech fizycznych (np. masy) i działających na nie sił. W zależności od właściwości badanych obiektów dzieli się na: kinematykę punktu materialnego i bryły sztywnej oraz kinematykę ośrodków ciągłych (odkształcalnego ciała stałego, cieczy i gazów).Pojęcie ruchu - aby opisać ruch jakiegokolwiek ciała, należy ustalić, jak zmienia się jego położenie względem innego ciała, które uznajemy za układ odniesienia.Gdy taka zmiana położenia nie zachodzi, dane ciało znajduje się w spoczynku względem tych ciał (w tym układzie odniesienia).
Symbole wielkości kinematycznych i ich jednostki • v - prędkość (m/s - metr na sekundę) • a - przyspieszenie (m/s² - metr na sekundę do kwadratu) • s - droga (m - metr) • t - czas (s - sekundy)
Prędkość- definiujemy jako zmianę położenia ciała w jednostce czasu.Prędkość stała:Jeżeli wskazania prędkościomierza samochodu nie zmieniają się to oznacza, że samochód porusza się ze stałą prędkością v, i jeżeli w pewnej chwili t0 znajdował się w położeniu x0 to po czasie t znajdzie się w położeniu x: skąd
Zależność między położeniem x i czasem t pokazana jest na rysunku poniżej dla dwóch ciał (np. pojazdów). Jak wynika ze wzoru (2.1) nachylenie wykresu x(t) przedstawia prędkość danego ciała. Różne nachylenia wykresów x(t) odpowiadają więc różnym prędkościom. Prędkość v (wektor) może być dodatnia albo ujemna; jej znak wskazuje kierunek ruchu. Wektor v dodatni - ruch w kierunku rosnących x, ujemny to ruch w kierunku malejących x.
Prędkość chwilowa:Gdy samochód przyspiesza lub hamuje to wskazania prędkościomierza zmieniają się i nie możemy mówić o "jednej" stałej prędkości. Prędkość zmienia się i w każdej chwili jest inna. Nie można wtedy stosować wzoru (2.1) chyba, że ograniczymy się do bardzo małych wartości x - x0 (Δx) czyli również bardzo małego przedziału czasu Δt = t - t0 (chwili). Prędkość chwilową w punkcie x otrzymamy gdy Δt dąży do zera: Tak definiuje się pierwszą pochodną więc: Prędkość chwilowa jest pochodną drogi względem czasu
Nachylenie krzywej x(t) ponownie przedstawia prędkość v, a znajdujemy je (zgodnie z definicją pochodnej) jako nachylenie stycznej do wykresu x(t), w danym punkcie tj. dla danej chwili t (rysunek poniżej). Nachylenie krzywej x(t) jest prędkością chwilową
Prędkość średnia:Często określenie zależności x(t) nie jest możliwe, np. przy oszacowaniu czasu dojazdu do wybranej miejscowości nie jesteśmy w stanie przewidzieć wszystkich parametrów podróży wpływających na prędkość takich jak natężenie ruchu, konieczność ograniczenia prędkości w terenie zabudowanym itp. Posługujemy się wtedy pojęciem prędkości średniej . Prędkość średnia ciała w przedziale czasu t jest zdefiniowana jako:
Wzory ogólne:Prędkość Przyspieszenie
Statyka - drugi po kinetyce dział dynamiki (będącej działem mechaniki), zajmujący się równowagą układów sił działających na ciało pozostające w spoczynku lub poruszające się ruchem jednostajnym i prostoliniowym. W przeciwieństwie do kinetyki, statyka zajmuje się zrównoważonymi układami, w których nie powstają siły bezwładności.Jeżeli układ sił działających na ciało spełnia I. zasadę dynamiki Newtona to ciało nie doznaje przyśpieszenia i pozostaje w spoczynku lub porusza się ruchem jednostajnym i prostoliniowym. Takie ciało nazywa się statycznym lub mówi się o nim, że zachowuje się statycznie. Opisem działających na nie sił zajmuje się statyka. W przeciwnym przypadku mamy do czynienia z dynamiką: ciało doznaje przyśpieszenia zmieniającego prędkość lub kierunek jego ruchu - pojawiają się siły bezwładności.
Statyka oprócz ciał stałych zajmuje się m.in. równowagą cieczy (hydrostatyka) i gazów (aerostatyka).Jednym z najogólniejszych twierdzeń dotyczących równowagi punktów materialnych jest zasada Lagrange'a.
Zasada Lagrange'a (także zasada prac wirtualnych lub zasada prac przygotowanych) – podstawowe twierdzenie statyki dotyczące równowagi układu punktów materialnych. Mówi ona, że w położeniu równowagi dla dowolnego małego przesunięcia punktów układu zgodnego z więzami suma prac wykonanych nad układem przy tym przesunięciu przez siły zewnętrzne jest zerowa.W postaci matematycznej zasada wyrażona jest następująco: dany jest układ N puntów materialnych. Położenie układu w przestrzeni konfiguracyjnej opisywane jest przez wektor x o współrzędnych Składowe wypadkowej siły zewnętrznej działającej na układ oznaczmy przez:
Dodatkowo ruch układu jest ograniczony przez więzy opisywane przez n równańW takiej sytuacji warunkiem koniecznym i wystarczającym na to, by pewien, spełniający równania więzów, punkt przestrzeni konfiguracyjnej był punktem równowagi układu, jest by w punkcie tym zachodziło: dla dowolnych liczb δxj spełniających warunki:
Pojęcia podstawowe:1. Siła - wynik wzajemnego, mechanicznego oddziaływania na siebie ciał. Siła jest wielkością wektorową. Siła może być skupiona (w punkcie) lub rozłożona (wzdłuż linii, na powierzchni lub w objętości).2. Więzy - warunki (najczęściej geometryczne) ograniczające swobodę poruszania się ciała.3. Stopień swobody - możliwość wykonywania przez ciało ruchu (przesuwnego - translacyjnego lub obrotowego - rotacyjnego), którą odbiera odpowiednio nałożony, pojedynczy więz.
Większość operacji w statyce dokonuje się na siłach, ich rzutach na wybrane kierunki oraz na wypadkowych układu sił. Siła skupiona jest wielkością wektorową więc operacje na siłach można wykonać wykreślnie za pomocą wektorów. Obowiązują tu zasady dodawania, odejmowania i mnożenia wektorów. Siła, tak jak reprezentujący ją wektor, ma następujące cechy: • określony kierunek (nie mylić ze zwrotem) - kierunek prostej, wzdłuż której działa • zwrot - taki jak wskazuje strzałka wektora. • określoną wartość - długość wektora (moduł). • punkt przyłożenia.
Aksjomaty statyki :Aksjomat 1Dwie siły przyłożone do ciała sztywnego równoważą się wzajemnie, jeżeli mają jednakowe wartości (moduły - długości wektorów), działają wzdłuż jednej prostej i mają przeciwne zwroty (czyli zerowa jest ich suma wektorowa - ich wypadkowa).Ten aksjomat wykorzystuje się do sprawdzenia, czy ciało jest w równowadze (spoczynku) pod działaniem układu dwóch sił lub układu sił dających się zredukować (zgodnie z aksjomatem 3 - za pomocą kolejnych wypadkowych) do dwóch sił.
Aksjomat 2Jeżeli do układu sił dodamy lub odejmiemy układ sił równoważny zeru (spełniający aksjomat 1), to działanie na ciało wyjściowego układu sił nie ulegnie zmianie.Czasami ułatwia to operację na wektorach sił bez zmiany równowagi ciała, na które one działają. W warunku równowagi sumy rzutów sił na dowolny kierunek, oprócz składników odpowiadających rzutom wyjściowego układu sił, po obu stronach równania wystąpią również składowe odpowiadające dodanym (lub odjętym) siłom. Przeniesienie ich na jedną stronę równania spowoduje ich wyzerowanie, dając równanie identyczne jak dla układu wyjściowego.
Aksjomat 3Wypadkowa dwóch sił przechodzi przez punkt ich przecięcia i wyraża się długością przekątnej równoległoboku zbudowanego na tych siłach (wypadkowa dwóch sił jest wektorową sumą swoich dwóch składowych).Dzięki temu aksjomatowi analizę równowagi układu wielu sił można uprościć do równowagi kilku ich wypadkowych. W przypadku szczególnym składowe są równoległe a ich kierunki nie pokrywają się. Wówczas ich przecięcie znajduje się w punkcie niewłaściwym w nieskończoności a określenie ich wypadkowych jest trudniejsze - prowadzi np. do siły i momentu.
Aksjomat 4Wszelkiemu działaniu siły odpowiada równe i przeciwne skierowane przeciwdziałanie (wówczas układ pozostaje statyczny).Ten aksjomat wykorzystuje się do poszukiwania kierunku, zwrotu, wartości lub punktu przyłożenia siły (np. wypadkowej sił reakcji), która zrównoważy inną, działającą na ciało siłę (lub wypadkową innego układu sił).
Aksjomat 5Równowaga ciała odkształcalnego nie zostanie naruszana jeżeli to ciało stanie się ciałem sztywnym.W statyce konstrukcji przyjmuje się tzw. zasadę zesztywnienia. Upraszcza ona badanie równowagi konstrukcji pod działaniem obciążeń, tak, jakby obciążenie nie powodowało odkształceń a konstrukcja pozostawała w tzw. konfiguracji pierwotnej. Stosując takie założenie wyznacza się reakcje podpór i siły wewnętrzne, które dopiero w dalszej kolejności umożliwiają określenie deformacji konstrukcji - jej odkształceń i przemieszczeń.
Przemieszczenia konstrukcji wiążą się także ze zmianą położenia jej obciążeń. Układając dla tak wyznaczonej konfiguracji odkształconej warunki równowagi szacuje się błędy obliczeń konstrukcji jako ciała sztywnego. W większości przypadków konstrukcji - wykonanych z materiałów tak sztywnych jak stal czy beton - uzyskuje się zadowalające wyniki.Jeżeli jednak błędy są za duże mówi się o konstrukcji nieliniowej geometrycznie a obliczone przemieszczenia traktuje jako pierwsze oszacowanie. Następne, lepsze przybliżenie otrzymuje się z warunków równowagi dla tej pierwszej konfiguracji odkształconej. Wyniki tych obliczeń określają nową konfigurację konstrukcji a iteracyjne powtarzanie czynności pozwala na uzyskanie wymaganej dokładności.
Aksjomat 6Ciało nieswobodne możemy traktować jak ciało swobodne jeżeli myślowo uwolnili się je od więzów, zastępując ich działanie odpowiednimi reakcjami.W statyce konstrukcji ten aksjomat wykorzystuje się do wyznaczenia sił reakcji więzów, jako sił biernych, powstałych w więzach podporowych i wewnętrznych na skutek działania sił czynnych - obciążeń.
Warunki równowagi:Zadaniem statyki jest badanie równowagi sił działających na ciało. Umożliwia to sprawdzenie, czy ciało pod działaniem sił jest statyczne albo określenie wartości sił lub innych wielkości tak, aby ciało pozostało statyczne (pozostało w spoczynku lub poruszało się jednostajnie i prostoliniowo - I. zasada dynamiki Newtona). Tym celom służą warunki równowagi statycznej (nie uwzględniającej sił bezwładności):-sumy rzutów sił na wybrane kierunki,-sumy momentów sił względem wybranych punktów.
Dynamika– dział mechaniki zajmujący się ruchem ciał materialnych pod działaniem sił. Głównym zadaniem dynamiki jest opis ruchu ciał pod działaniem samych sił. Do tego służą trzy rodzaje dynamicznych równań ruchu. W zależności od tego, jakim modelem mechanicznym dynamika się zajmuje, wyróżniamy dynamikę punktu materialnego, bryły sztywnej, dynamikę płynów itp.Ogólne zasady dynamiki sformułował Newton, w swoim dziele "Principia" – były to trzy zasady dynamiki rządzące ruchem ciał (punktów materialnych).
Zasady dynamiki Newtona:Podstawowa teoria, która pozwala przewidywać ruch ciał, składa się z trzech równań, które nazywają się zasadami dynamiki Newtona.Sformułowanie pierwszej zasady dynamiki Newtona:Ciało, na które nie działa żadna siła (lub gdy siła wypadkowa jest równa zeru) pozostaje w spoczynku lub porusza się ze stałą prędkością po linii prostej.
Siła wypadkowa Fwyp jest sumą wektorową wszystkich sił działających na ciało. Jeżeli Fwyp = 0 to również przyspieszenie ciała a = 0, a to oznacza, że nie zmienia się ani wartość ani kierunek prędkości tzn. ciało jest w stanie spoczynku lub porusza się ze stałą co do wartości prędkością po linii prostej. Zgodnie z pierwszą zasadą dynamiki nie ma rozróżnienia między ciałami spoczywającymi i poruszającymi się ze stałą prędkością. Nie ma też różnicy pomiędzy sytuacją gdy nie działa żadna siła i przypadkiem gdy wypadkowa wszystkich sił jest równa zeru. Sformułowanie drugiej zasady dynamiki Newtona:Tempo zmian pędu ciała jest równe sile wypadkowej działającej na to ciało. Dla ciała o stałej masie sprowadza się to do iloczynu masy i przyspieszenia ciała.
Sformułowanie trzeciej zasady dynamiki Newtona:Gdy dwa ciała oddziałują wzajemnie, to siła wywierana przez ciało drugie na ciało pierwsze jest równa i przeciwnie skierowana do siły, jaką ciało pierwsze działa na drugie.
Pierwsza zasada dynamiki wydaje się być szczególnym przypadkiem drugiej bo gdy a = 0 to i Fwyp = 0 . Przypisujemy jej jednak wielką wagę dlatego, że zawiera ważne pojęcie fizyczne: definicję inercjalnego układu odniesienia.Pierwsza zasada dynamiki stwierdza, że jeżeli na ciało nie działa żadna siła (lub gdy siła wypadkowa jest równa zeru) to istnieje taki układ odniesienia, w którym to ciało spoczywa lub porusza się ruchem jednostajnym prostoliniowym. Taki układ nazywamy układem inercjalnym.
Układy inercjalne są tak istotne bo we wszystkich takich układach ruchami ciał rządzą dokładnie te sama prawa. Większość omawianych zagadnień będziemy rozwiązywać właśnie w inercjalnych układach odniesienia. Zazwyczaj przyjmuje się, że są to układy, które spoczywają względem gwiazd stałych ale układ odniesienia związany z Ziemią w większości zagadnień jest dobrym przybliżeniem układu inercjalnego. Ponieważ przyspieszenie ciała zależy od przyspieszenia układu odniesienia (od przyspieszenia obserwatora), w którym jest mierzone więc druga zasada dynamiki jest słuszna tylko, gdy obserwator znajduje się w układzie inercjalnym. Inaczej mówiąc, prawa strona równania F = ma zmieniałaby się w zależności od przyspieszenia obserwatora.
Pierwsza i druga zasada dynamiki Newtona w oryginalnym wydaniu Principia Mathematica z 1687 r.