Download
1 / 18
180 likes | 259 Views
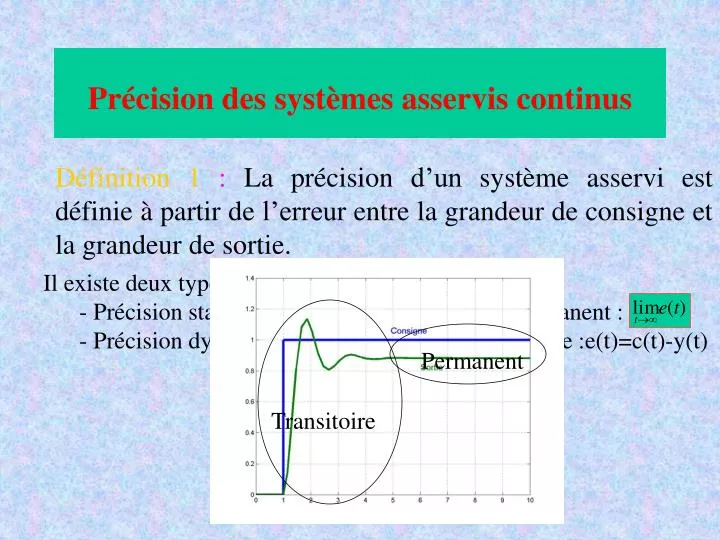
Il existe deux types de précision : - Précision statique qui caractérise le régime permanent : - Précision dynamique est liée au régime transitoire :e(t)=c(t)-y(t). Permanent. Transitoire. Précision des systèmes asservis continus.

E N D
Il existe deux types de précision : - Précision statique qui caractérise le régime permanent : - Précision dynamique est liée au régime transitoire :e(t)=c(t)-y(t) Permanent Transitoire Précision des systèmes asservis continus Définition 1 : La précision d’un système asservi est définie à partir de l’erreur entre la grandeur de consigne et la grandeur de sortie.
Structure d’un système asservi w(t) H(s) y2(t) + yc(t) y u(t) y1(t) + C(s) G(s) - + Fonction de transfert en boucle fermée Si w(t)=0 alors Si yc(t)=0 alors
Précision des systèmes asservis • Écart dynamique On suppose que avec avec
Écart statique dû à la consigne (w(t)=0) En pratique, on intéresse essentiellement à l’erreur en position, en vitesse et en accélération qu’on note (ep, ev, ea) On appelle constante d’erreur en position On appelle constante d’erreur en vitesse On appelle constante d’erreur en accélération
Précision statique Erreur en position : (consigne est un Echelon yc(t)=1) Si Alors Si Alors Erreur en Vitesse : (consigne est une rampe yc(t)=t) Si Alors Si Alors Si Alors Erreur en accélération : (consigne est une parabole yc(t)=t2/2) Si Alors Si Alors Si Alors
Perturbation Précision statique Consigne : Echelon Consigne : Rampe
Perturbation Perturbation Précision statique Consigne : Parabole yc(t)=t2/2
Précision statique Erreur en vitesse = Erreur de traînage
w(t) H(s) y2(t) + yc(t) y u(t) y1(t) + C(s) G(s) - + Écart statique dû à la perturbation (yc(t)=0) avec avec Si yc(t)=0 alors Ecart statique dû à la perturbation est défini par :
Si la perturbation est constante : w(t) =1 Si a et b sont nuls alors ep= Si a – b 1 alors ep= 0 Si a – b 2 alors ev= 0 Si a -b =0 alors ep= Si la perturbation est une rampe : w(t) =t Si a -b =0 alors ev=- Si a – b =1 alors ev= Ecart dû à la perturbation
Précision dynamique Le comportement dynamique d’un système asservi peut-être entièrement caractérisé par : - la réponse indicielle - la réponse fréquentielle Caractérisation par comparaison avec les comportements des systèmes du premier ou second d’ordre.
Comparaison à un système de 1e ordre Si C(s)G(s)= ou C(s)G(s) = la FTBF : Cas FTBO = Kf=1 et tf=1/K Cas FTBO = Kf=K/(1+K) et tf=t/(1+K) L’écart dynamique e(t)=yc(t)-y(t)=1-Kf(1-e-t/tf)
Comparaison à un système de 1e ordre Erreur indicielle Comportement Fréquentiel
Comparaison à un système de 2e ordre Erreur indicielle Pour les pôles sont réels et l’écart a un comportement ss 1e ordre tm Pour les pôles sont complexes n % D tr n%