Download
1 / 38
440 likes | 1.04k Views
AUTOMATIZACIJA I ROBOTIKA. tema:. HVATALJKA ROBOTA. Kviz počinje !. Podelite se u dve grupe. S K R I V A L I C A. Pravila za otkrivanje skrivalice. Ispod 16 polja nalazi se tajanstvena slika. Učenici podeljeni u dve grupe naizmenično biraju jedno od ponuđenih polja.

E N D
AUTOMATIZACIJA I ROBOTIKA tema: HVATALJKA ROBOTA
Kviz počinje ! Podelite se u dve grupe
Pravila za otkrivanje skrivalice Ispod 16 polja nalazi se tajanstvena slika Učenici podeljeni u dve grupe naizmenično biraju jedno od ponuđenih polja
Klikom na odabrano polje otvara se pitanje Tačnost odgovora se proverava na desnoj strani slajda Ako je odgovor tačan ponovo kliknite na pitanje da bi se pojavio deo tajanstvene slike
Ako odgovor nije tačan učenik iz druge grupe bira novo polje i daje odgovor na dobijeno pitanje Tek kada se otvore sva polja učenici stiču pravo da odgovaraju na već otvoreno pitanje
Bez obzira da li je pogođeno šta se nalazi na sakrivenoj slici igra se nastavlja dok se ne daju svi odgovori na pitanja Tačan odgovor donosi ekipi 5 bodova Ekipa koja pogodi šta je na skrivenoj slici dobija 20 bodova
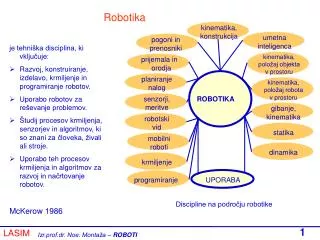
Koliko stepeni slobode ima slobodno t elo u prostoru? 1 2 Šta se meri linearnim potenci- ometrom? Koje cifre sadrži binarni sistem cifara? 3 Pročitaj: A/D konverzija 4 ODGOVORI 1 6 translatorno pomeranje 2 0 i 1 3 5 Za šta se koristi skraćenica: EKM Pročitaj: D/A konverzija 6 7 Koji je osnovni uređaj vizuelnog sistema? Šta se meri mernim trakama? 8 4 analogno - digitalna 5 elektro - koračni motor 6 digitalno - analogna 7 kamera sila 8 9 Šta su AC motori? 10 Koliko stepeni slobode ima sferni zglob? Koji sistem cifara koriste digitalni uređaji? 11 12 Šta su DC motori? 9 elektromotori naizmenične struje 10 3 binarni 11 elektromotori jednosmerne struje 12 13 Kako se kod nas nazivaju step motori? 14 Šta meri relativni enkoder? 15 Za šta se koristi skraćenica: CNC 16 Koliko stepeni slobode ima cilindrični zglob? 13 elektro - koračni motori 14 ugaono pomeranje 15 numeričke mašine 2 16
ZAVRŠNI UREĐAJI ROBOTA 1. Hvataljke 2. Alati ili uređaji za procesne operacije 3. Merno-kontrolni uređaji
ZADATAK HVATALJKE ROBOTA HVATANJE PREDMETA
ZADATAK HVATALJKE ROBOTA HVATANJE PREDMETA DRŽANJE PREDMETA TOKOM PRENOŠENJA
ZADATAK HVATALJKE ROBOTA HVATANJE PREDMETA DRŽANJE PREDMETA TOKOM PRENOŠENJA
ZADATAK HVATALJKE ROBOTA HVATANJE PREDMETA DRŽANJE PREDMETA TOKOM PRENOŠENJA
ZADATAK HVATALJKE ROBOTA HVATANJE PREDMETA DRŽANJE PREDMETA TOKOM PRENOŠENJA
ZADATAK HVATALJKE ROBOTA HVATANJE PREDMETA DRŽANJE PREDMETA TOKOM PRENOŠENJA ISPUŠTANJE PREDMETA
HVATALJKE Podela prema načinu hvatanja: 1. Sa mehaničkim prstima 2. Vakuumske 3. Magnetne 4. Prilagodljive
HVATALJKE SA MEHANIČKIM PRSTIMA Podela prema broju prstiju: 1. Sa dva prsta 2. Sa više prstiju
HVATALJKE SA MEHANIČKIM PRSTIMA Podela prema kretanju prstiju: 1. Sa translatornim kretanjem prstiju 2. Sa obrtnim kretanjem prstiju
HVATALJKE SA MEHANIČKIM PRSTIMA Podela prema mestu hvatanja: 1. Sa spoljašnjim hvatanjem 2. Sa unutrašnjim hvatanjem
HVATALJKE SA MEHANIČKIM PRSTIMA Podela prema načinu hvatanja: 1. Hvatanje trenjem 2. Hvatanje geometrijskim oblikom
POGON MEHANIČKIH HVATALJKI -Elektromotori -Hidraulični pogon -Pneumatski pogon Najviše se koristi pneumatski pogon Prednost ovog pogona je u velikoj brzini izvršavanja zadate radnje Mogući nedostatak je mala sila hvatanja
Kinematska šema mehaničke hvataljke sa pneumatskim pogonom (otvaranje) Ubacivanje vazduha
Kinematska šema mehaničke hvataljke sa pneumatskim pogonom (zatvaranje) Ubacivanje vazduha
Sada ću vam prikazati jednu simulaciju rada hvataljke robota u programu CIROS Studio Besplatnu demo verziju ovog programa možete preuzeti sa Web lokacije www.ciros-engineering.com
Sačekajte nekoliko trenutaka Kliknitenaikonicu CIROS Studio Trial Version koja se nalazinapaletiposlova i izaberite primer Fanuc S700 IZABERITE
Kviz se nastavlja ! Izvršimo analizu prikazane simulacije kroz odgovore na sledeća pitanja Tačan odgovor donosi ekipi 5 bodova
Na slici je prikazan postupak: a) montaže b) paletizacije proizvoda c) opsluživanja mašine
Konstrukcija robota na slici je: a) pravougaona (portalna) b) sferna c) laktasta (zglobna)
Koliko osa rotacije ima robot na slici? a) 3 b) 4 c) 5
Završni uređaj robota na slici je u obliku: a) hvataljke b) procesnog uređaja c) mernog uređaja
Hvataljka robota na slici je sa: a) mehaničkim prstima b) vakuumska c) magnetna
Pogon hvataljke robota na slici je: a) mehanički b) hidraulični c) pneumatski Zašto?
Za identifikaciju dolaska i brojanje proizvoda koristi se: a) kamera b) laser c) fotodetektor
Za merenje rastojanja proizvoda i zaustavljanje trake koristi se: a) kamera b) laser c) fotodetektor