Download
1 / 5
70 likes | 240 Views
Denavit u. Hartenberg - Beschreibung. Darstellung der Bewegungsmöglichkeiten des Roboters Quelle: Skripte v. Prof. Müller. Denavit u. Hartenberg - Beschreibung. z 0. z 2. Bild betrachten. L 2. TCP.

E N D
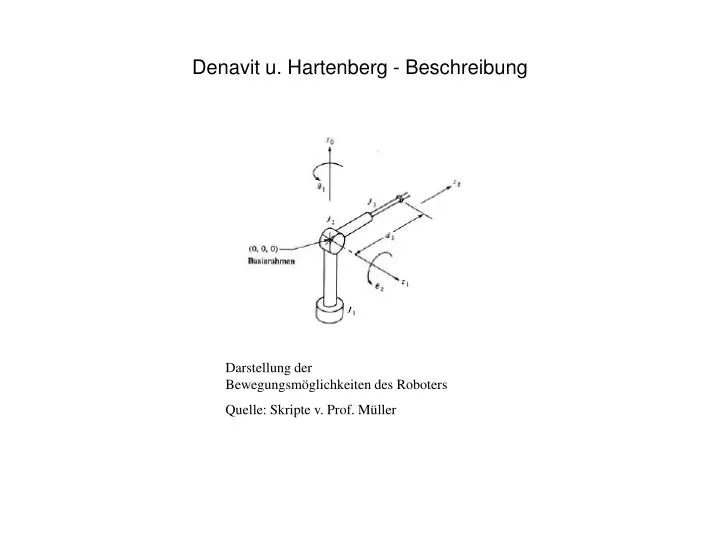
Denavit u. Hartenberg - Beschreibung Darstellung der Bewegungsmöglichkeiten des Roboters Quelle: Skripte v. Prof. Müller
Denavit u. Hartenberg - Beschreibung z0 z2 • Bild betrachten L2 TCP 2. Gelenke (Joint) und Arme (Links) von unten nach oben bei 1 für Gelenke und Null für Arme beginnend bezeichnen. J2 L1 J3 L0 z1 3. z-Achsen einzeichnen. z-Achse liegt im Gelenk. Rotation des Gelenk erfolgt um z-Achse J1 x2 z0 4. Koordinatensysteme vervollständig (Rechte Hand Regel) z2 x1 x0 y0 y2 y1 z1
Jetzt geht es erst richtig los! 4. Koordinatensysteme vervollständig (Rechte Hand Regel) x2 z0 z2 • Koordinatentransformation durchführen 5. 1. Koordinatensysteme aller „Zwischenpunkte“ groß rauszeichnen x1 x0 y0 y2 Start: Koordinatensystem im Basisrahmen z0 y1 z1 x0 y0 x1 Ziel: Koordinatensystem im TCP 5. 2. Bewegungsabläufe festlegen um von einen zum nächsten Punkt zu kommen, dabei gilt: x2 z2 • BEACHTEN: Reihenfolge jeweils (nicht vertauschbar) • Drehung um z-Achse - θ • Translation auf der z-Achse - d • Translation auf der x –Achse - a • Rotation um die x –Achse - α • Sollte etwas nicht benötigt werden, ist es jeweils 0. • Translation bzw. Rotation um die y-Achse wird nicht ausgeführt. z1 y1 y2
5. 2. Bewegungsabläufe festlegen um zum nächsten Punkt zu kommen 1.Drehung um die x-Achse θ=0°, d=0, a=0 α=90° 2. Drehung um die z-Achse und danach (aber in einer Matrix) Drehung um die x-Achse θ=90°, d=0, a=0 α=90° x2 z2 z0 x0 y‘0 x1 x1 y0 z1 y2 x‘0 Ziel: Koordinatensystem im TCP z1 y1 z‘0 y1 3. Längs der Achse z2 um d3 Verschieben θ=0°, d=d3, a=0 α=0° 0° 0 0 90° Hinweis: Sollte es nicht möglich sein mit den 4 Möglichkeiten (RTTR) von einem Gelenk zum nächsten zu kommen, dann ein weiteres Gelenk mit dem FR=0 (starr) einfügen. 90° 0 0 90° 0° d3 0 0°
5. 3. Matrix aufschreiben: dazu Tabelle übernehmen • und einsetzen 0° 0 0 90° • Ausrechnen der Einzelnen Schritte 90° 0 0 90° • Gesamtberechnung in dieser Reihenfolge 0° d3 0 0°