Download
1 / 9
90 likes | 239 Views
Numerick é řešení počítačového modelu. Problém: numericky simulovat (modelovat) chování systému (odezv y zahrnující vliv počátečních podmínek a zm ěn vstupů). Numerický výpočet. Vztah výstupní rovnice je pouze algebraickým přepočtem, v numerickém řešení se nepromítá jako problém.

E N D
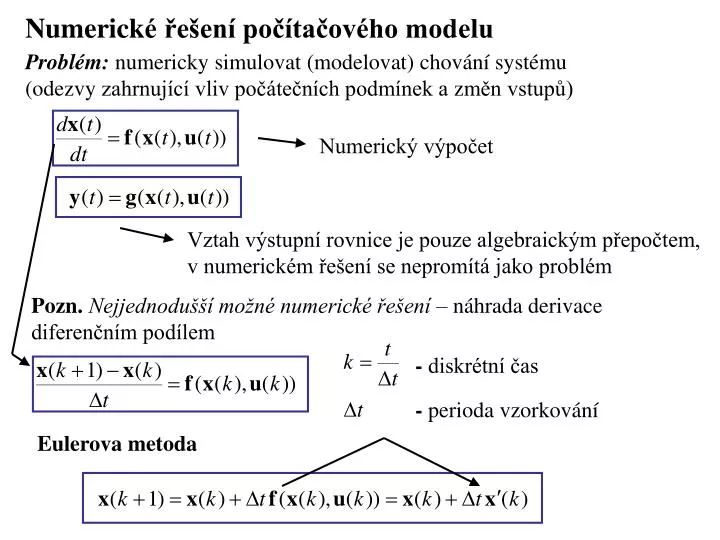
Numerické řešení počítačového modelu Problém: numericky simulovat (modelovat) chování systému (odezvy zahrnující vliv počátečních podmínek a změn vstupů) Numerický výpočet Vztah výstupní rovnice je pouze algebraickým přepočtem, v numerickém řešení se nepromítá jako problém Pozn.Nejjednodušší možné numerické řešení– náhrada derivace diferenčním podílem - diskrétní čas - perioda vzorkování Eulerova metoda
Obecný vícekrokový (víceuzlový) vzorec pro numerické řešení stavové rovnice • Numerické metody řešení přiřazují ke spojitému modelu model diskrétní. • Na rozdíl od diskrétní stavové formulace nevyužívají pro výpočet x(k+1) jen hodnotx af v čase k, ale i hodnot starších Klasifikace metod numerického řešení explicitní, -1=0 implicitní, -10 1) vzorce jednouzlové, p=0 víceuzlové, p>0 počet uzlů– p+1 2) vzorce 3) řád metody, čím vyšší řád, tím vyšší přesnost
Lokální chyba vzorce Euler, r=1 lichoběžníkový kor., r=2 • rozdíl mezi numerickým a exaktním řešením na intervalu Dt, při předpokladu že x(tk) známe naprosto přesně. • slouží především k vzájemnému porovnání vzorců - globální chyba řešení – akumulace lokálních a zaokrouhlovacích chyb
Runge-Kutta v programu Matlab - vzorce v Simulink pro pevný krok(fixed step solvers) ode5 - Dormand-Prince ode4 - Runge-Kutta 4tého řádu ode3 - Bogacki-Shampine ode2 - Heun (ode1 - Euler) Vnořené R-K vzorce (solvery v Simulinku i funkce v Matlabu): ode45 ode23 - zahrnují v sobě algoritmus pro adaptaciDt
Stabillita numerické metody • Aplikací numerické metody pro řešení stavové rovnice je spojitý systém nahrazen diskrétním. Z toho vyplývá • zavedení lokální chyby v každém kroku • jiné podmínky stability Stabilita jednouzlových vzorců si – vlastní čísla maticeA zi- vlastní čísla matice M podmínka stability:
Oblasti stability explicitních vzorců se navzájem liší jen nepodstatným způsobem. Oblasti stability jednouzlových explicitních metod: E - Eulerova, RK-2, RK-4 - Rungeho-Kutty 2. a 4.řádu Přesnost explicitních Runge-Kutta metod značně vyšší než přesnost Eulerovy metody, ale oblasti stability jsou podobně malé
Implicitní metody - široká oblast stability - problematická realizace A - stabilní metody, oblast stability pokrývá celou levou polorovinu Eulerova metoda, Lichoběžníkový korektor, ... Stab. - použití pro stiff systémy (systémy jejichž módy jsou definovány řádově rozdílnými časovými konstantami)
Výpočet podle implicitních metod Přímé řešení použití u lineárních systémů, nutná inverze matice (nesmí být singulární ani špatně podmíněná) Semiimplicitní metody– pronelineární systémy Použití Jacobiho matice Jx - výpočet Jx je nutné provádět v každém kroku - semiimplicitní metody nejsou A stabilní, ale dovolují podstatně delší krok než explicitní metody